Le moteur XN3 est un moteur de rendu terrestre sphérique temps réel multi-plateforme. Entièrement écrit en C/C++, ce moteur ultra performant est la pierre angulaire de toutes les solutions de navigation et de visualisation exigeantes.
Caractéristiques principales :
- Bibliothèque multi-plateforme (Windows, OSX, iOS, Android/JNI, GNU/Linux), 32 et 64 bits
- Compatible OpenGL et OpenGLES 1, 2 et 3
- Aucune dépendance
- API accessible en C
- Rendu temps réel hautes performances (60 FPS sur iPad deuxième génération)
- Exemples d’intégration fournis
- Faible empreinte de code
Fonctionnalités :
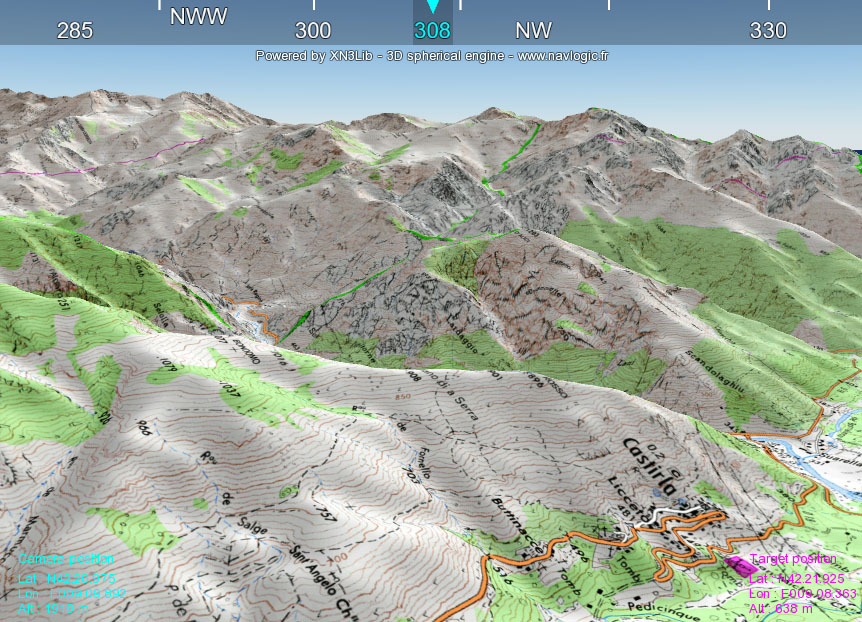
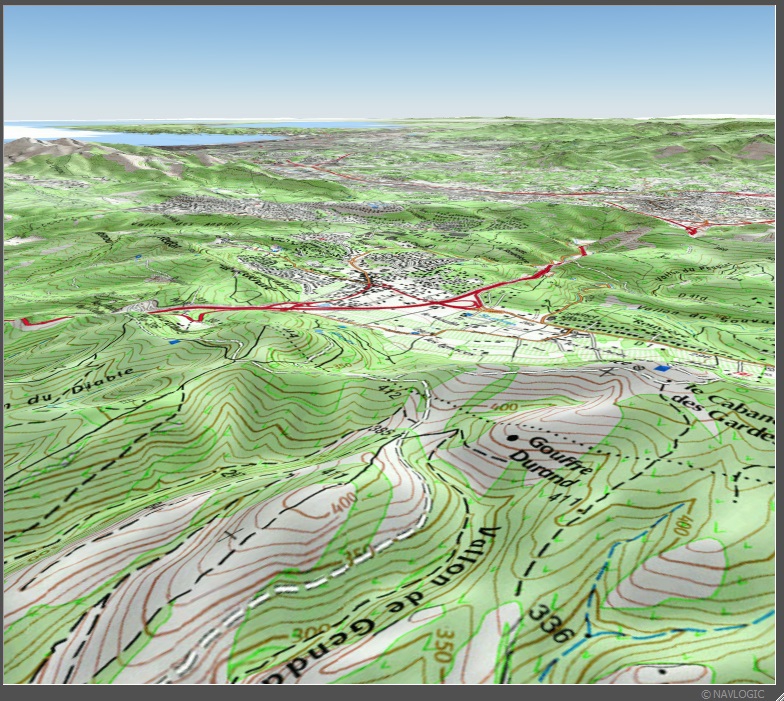
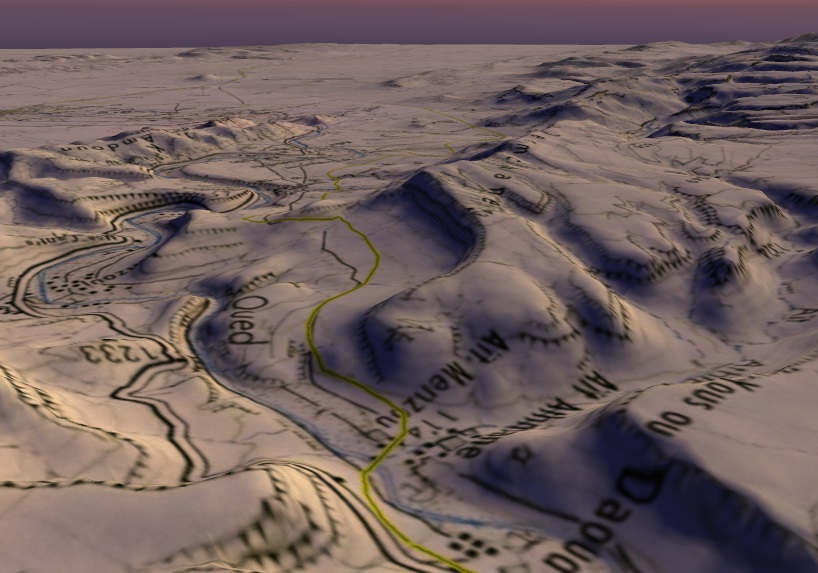
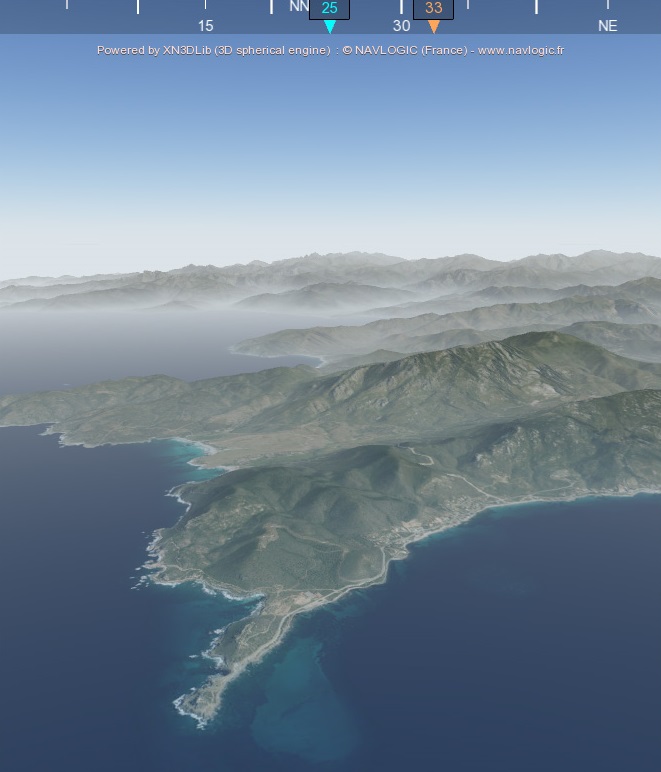
- Modes de rendu : 3D (paysage), sphérique, et plan
- Instances et vues indépendantes multiples
- Gestion de niveaux de détails multiples (LODs)
- Format de données optimisé
- Gestionnaire d’altitude pour une lecture précise de modèles numériques de terrain
- Gestionnaire de toponymes intelligent pour une signalétique en vue 3D
- Colorisation de maillage en fonction de l’élévation du terrain
- Pipeline de rendu ouvert et contexte OpenGL accessible
Cette bibliothèque est fournie avec ces outils dédiés à la génération de données ainsi qu’une documentation exhaustive et différents exemples d’intégration.
L’architecture du moteur est prévue pour recevoir vos propres fonctions de dessin OpenGL et rend donc très facile son adaptation à tout type de solution (simulateur de vol, système de guidage, etc).